Force and Torque Fundamentals: Principles and Classification of Torque Sensors
1. Definition and Key Differences Between Force and Torque
1.1 Force
- Definition: An interaction between objects that can change their motion state or cause deformation.
- Key Characteristics:
- Vector quantity (magnitude and direction), measured in Newtons (N)
- Point of application affects results (e.g., pushing a door at different positions creates varying effects)
1.2 Torque
- Definition: The rotational effect produced by a force acting at a distance from a pivot point.
- Formula: M = F × L (Unit: N·m)
- Key Characteristics:
- Direction determined by right-hand rule
- Requires non-collinear forces to generate meaningful torque
1.3 Comparative Analysis
| Parameter | Force | Torque |
|---|---|---|
| Primary Effect | Linear motion (e.g., pushing objects) | Rotational motion (e.g., turning bolts) |
| Measurement Unit | Newton (N) | Newton-meter (N·m) |
2. Classification of Torque Sensors
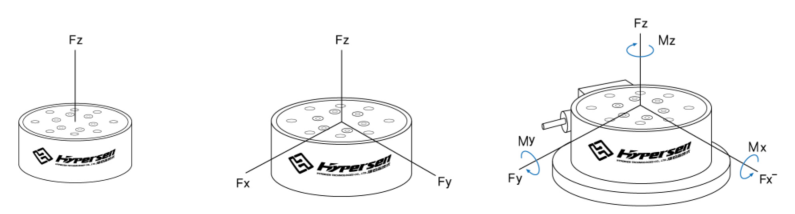
2.1 By Measurement Dimensions
- 1-Axis: Measures single-direction torque (e.g., torque wrenches)
- 3-Axis: Measures torque in two orthogonal directions (e.g., robotic joint monitoring)
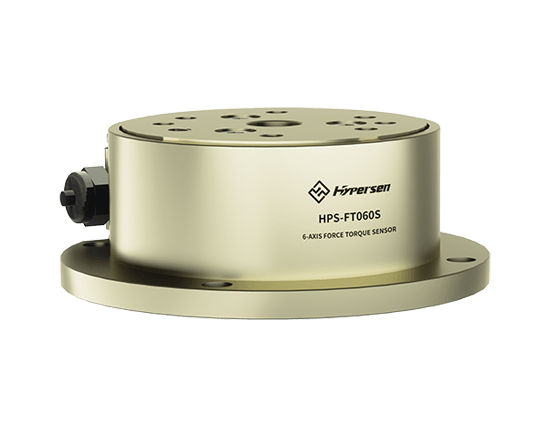
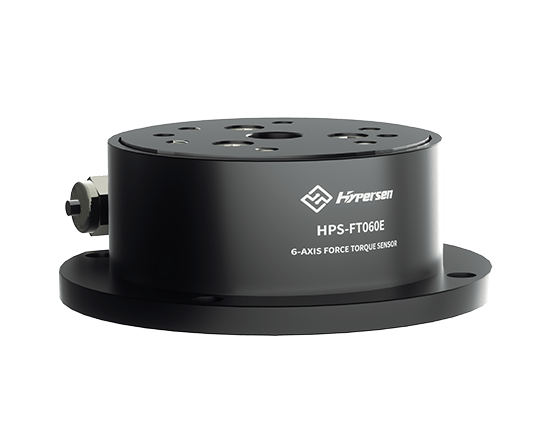
- 6-Axis: Simultaneously measures three linear forces (Fx, Fy, Fz) and three rotational moments (Mx, My, Mz) (e.g., Humanoid Robot Joints, Collaborative Robots, Medical Robots, etc.)
2.2 By Working Principle
| Type | Operating Principle | Key Features |
|---|---|---|
| Strain Gauge | Measures resistance changes in deformed strain elements | High accuracy (±0.25%FS), robust construction |
| Piezoelectric | Detects charge generation in piezoelectric crystals | Ultra-high frequency response (>30kHz) |
| Optical | Tracks displacement via light intensity modulation | Excellent EMI immunity, no electrical contact |
3. Industrial Applications
- Robotics: Force-controlled assembly, precision grinding/polishing

- Medical Technology: Haptic feedback in surgical robotics

- Industrial Automation: Docking force monitoring, actuator control systems

Technical Summary
As fundamental mechanical quantities, force and torque measurement enables advanced motion control across industries. 6-axis torque sensors have become indispensable in smart manufacturing due to their multidimensional measurement capability and sub-Newton precision. Strain gauge-based solutions currently dominate industrial applications, while piezoelectric and optical variants serve specialized high-performance needs.
This technical framework provides essential knowledge for engineers evaluating torque measurement solutions for robotic, industrial automation, or R&D applications. For specific implementation cases or custom sensor requirements, please consult with our technical team.
Note: All technical specifications represent typical industry standards. Actual product parameters may vary by manufacturer and application requirements.